
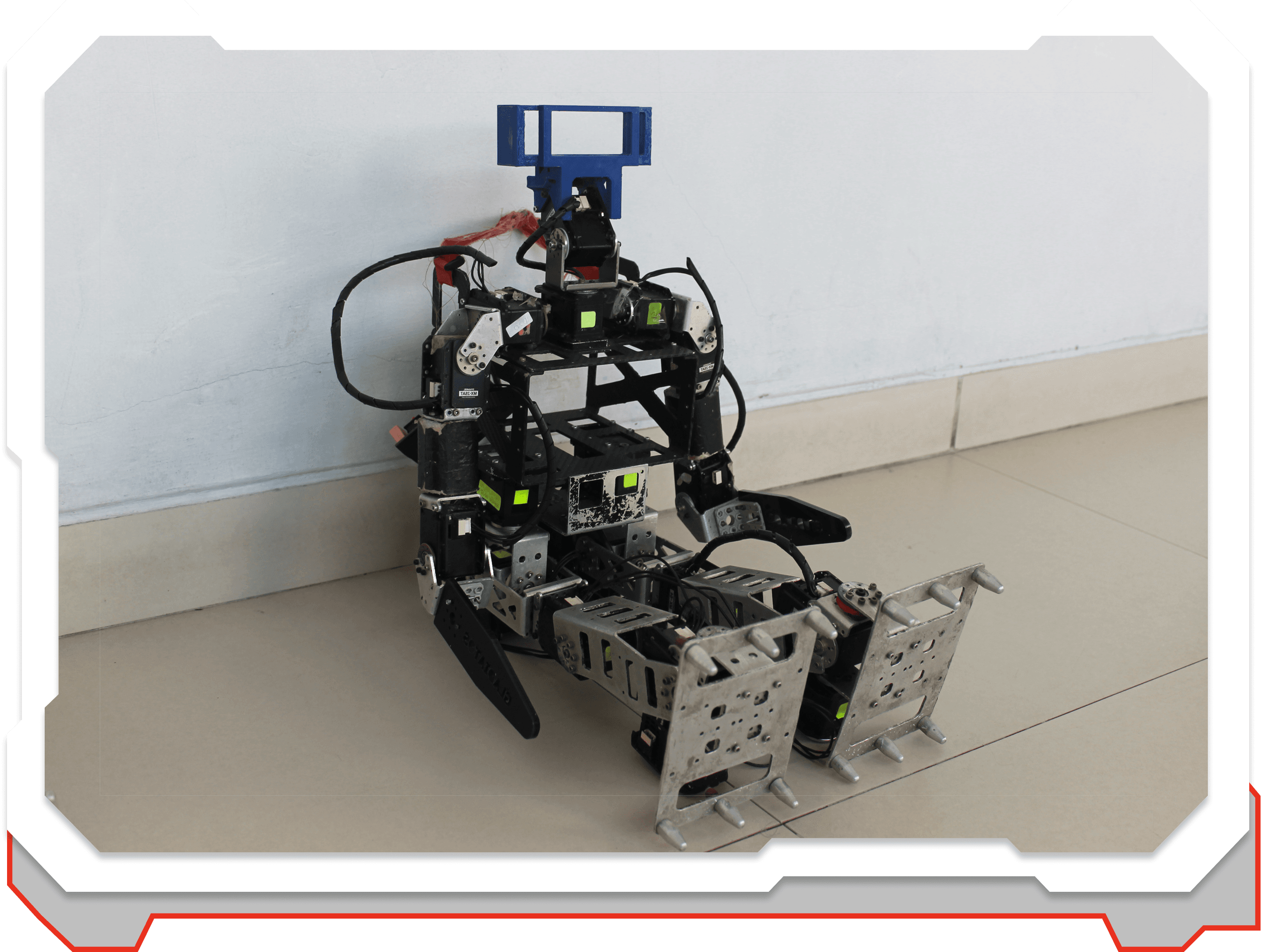
Darnet
Darnet is a compact humanoid-style robot built for controlled ball-kicking tasks. Its sturdy frame and articulated joints provide stable movement and accurate strikes. The robot supports sensors for tracking targets. Designed for agility, it performs reliably in scoring-focused challenges.
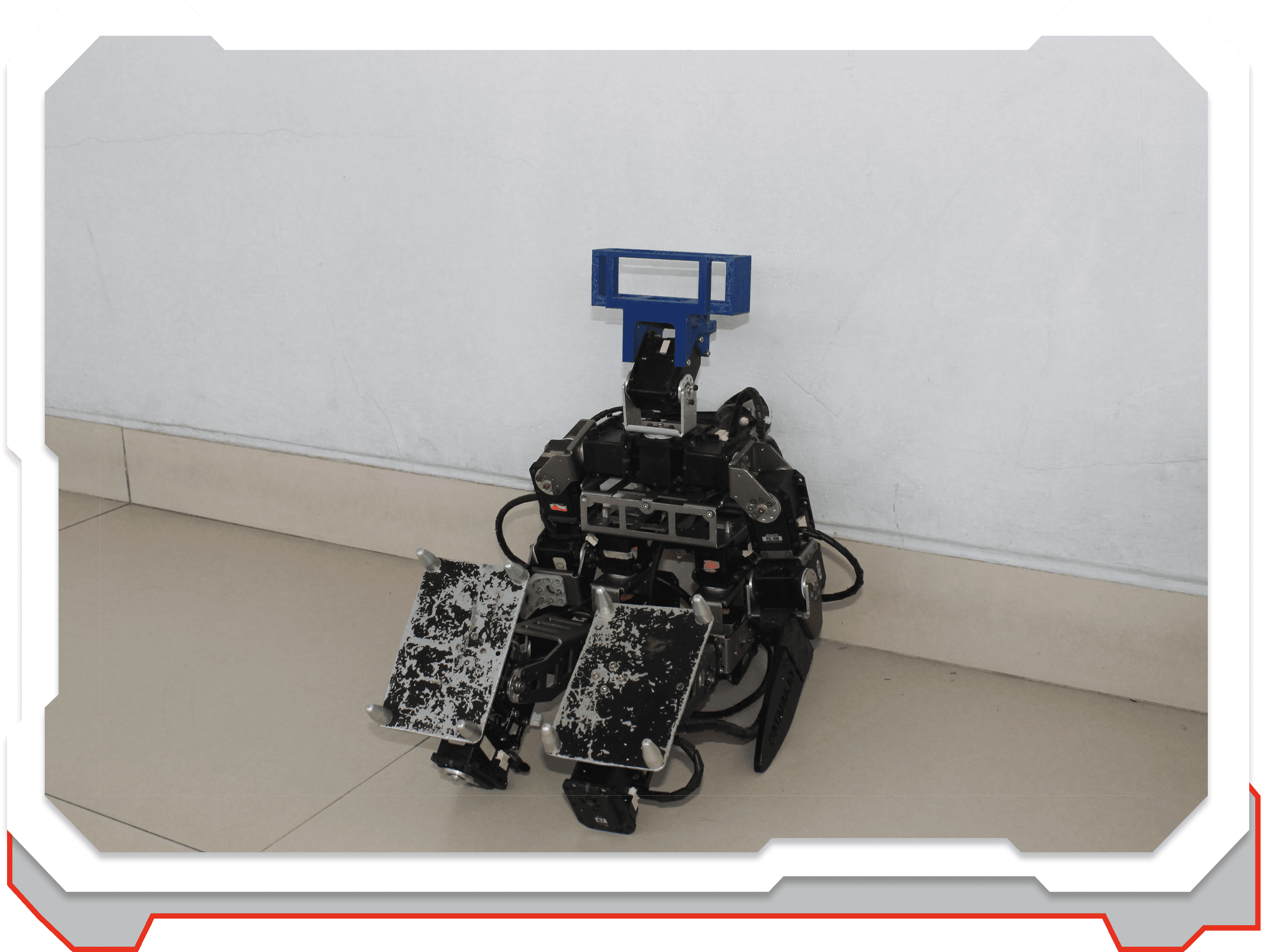
Darput
Darput is a smaller humanoid-style robot designed for defensive roles in robot soccer. Its stable frame and wide feet help it block shots effectively. The joints allow quick positioning to intercept the ball. Built for reliability, it supports the team’s backline.
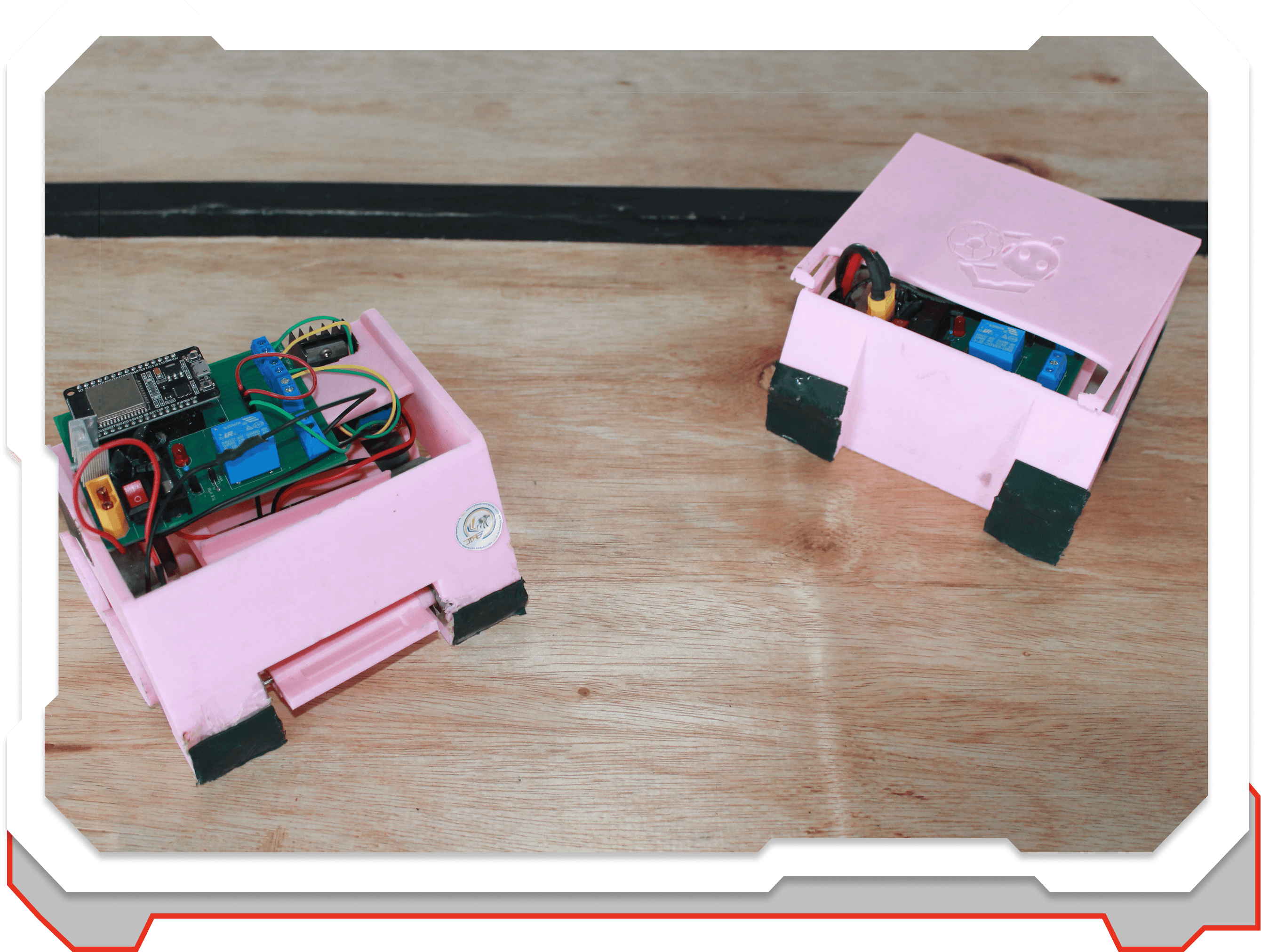
Dartos
Dartos is a small non-humanoid soccer robot made to push balls toward the goal. Its compact design allows fast, controlled movement on the field. Multiple units are often used for better coordination. Built for the ERIC UNJ competition, it focuses on speed and teamwork.